*** NOTE for Tom Igoe, if you’re reading this*** This project was for Fabrication but it carried a lot of the same principals that we cover in Physical Computation so I’ve posted it on my pCom blog as well.
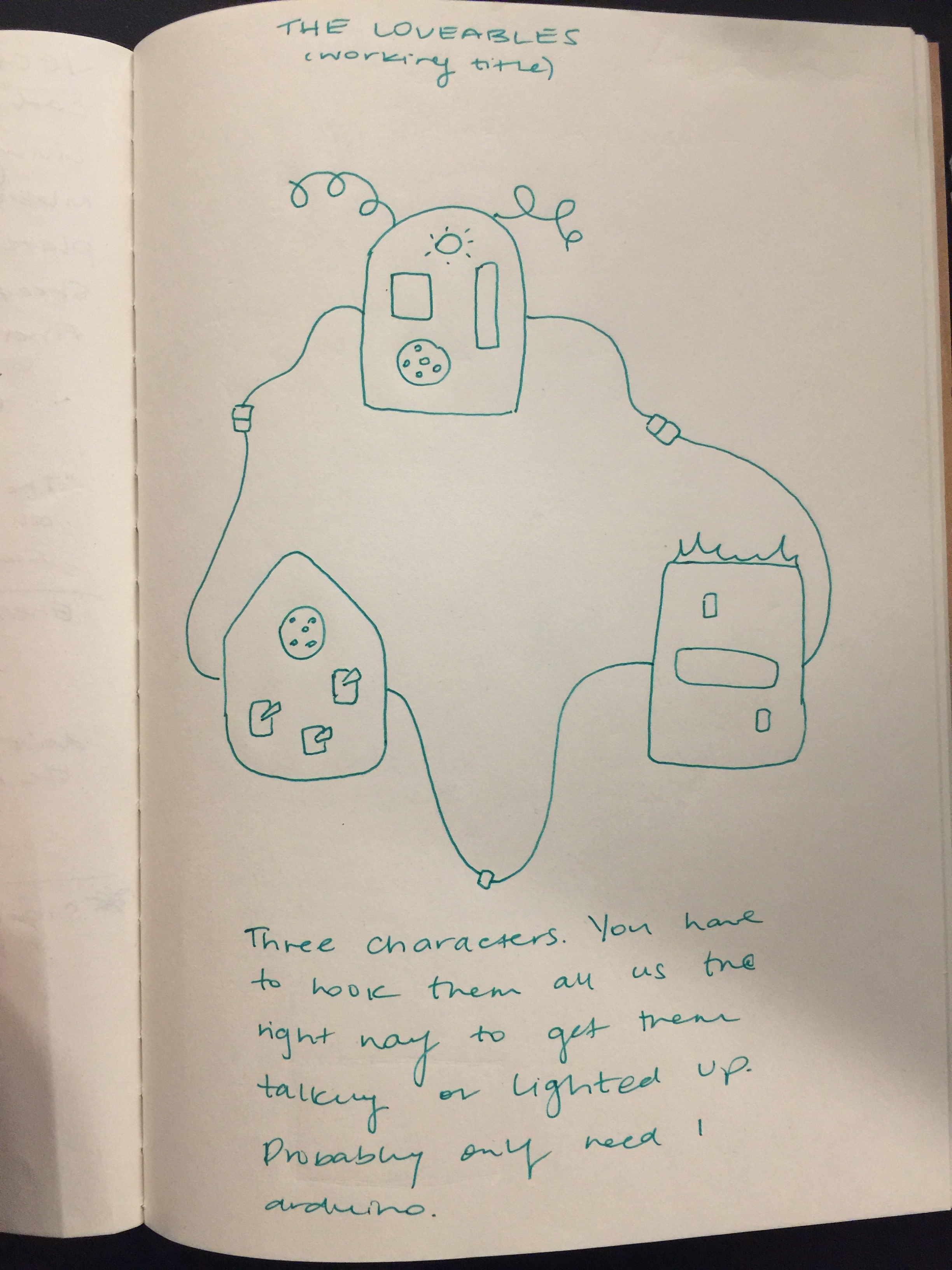
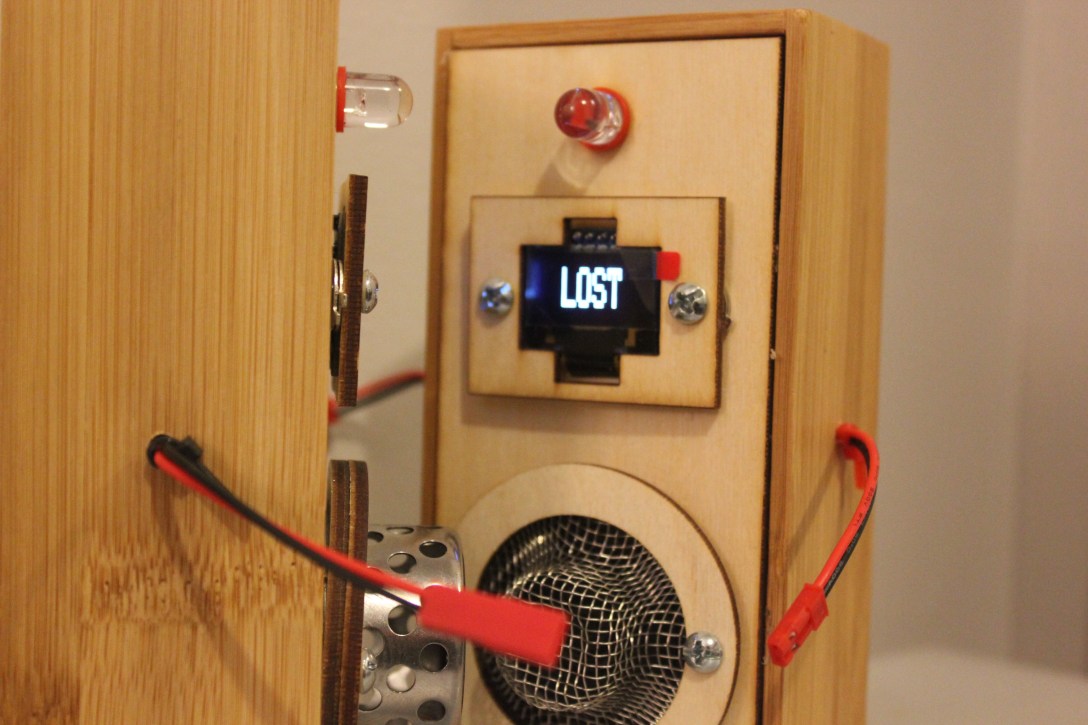
For this assignment, I decided to execute an idea that I’ve had for a couple of weeks. I made two little robots with connectors for hands. When these robots hands are disconnected, meaning when they are not holding hands, their screens read “LOST” and their little headlights are off. When their hands are connected, meaning when they are holding hands, their screens read “FOUND” and their headlights shine red.
First, I made a trip to the hardware store. I wanted to look for interesting grills that could be used as mouths. This would be their differentiating feature. I found these great drain catchers in the plumbing section. Both were relatively the same size but each quite different in appearance. I got my screens and my LEDs from Tinkersphere.

Then I made a trip to the container store to get the majority of the enclosure. I briefly considered the dome shaped enclosures above but I really liked the look of the panel sound mixing boards so I picked up a couple of the bamboo boxes in the smallest size.

Once I had everything, I decided to test out some of my tech. I had never used these little screens before of the “science fair LED” that I bought.
Then I started the most time consuming part of the assignment – measuring all my parts with callipers to create the design file. This took an eternity but it was actually kind of fun! After taking all my measurements and making a starter file, I sat next to the laser cutter and cut samples to see if my tolerances with large enough or small enough to create the fit I was looking for. The speakers, for instance are made up of many layers of laser cut wooden disks, each designed to have a snug fit around the speakers and their grills.


Once my parts were laser cut, I assembled the parts. I had to sand a couple but they largely all fit together.



Once my pieces were in place, I tested all the electronics again, just to make sure that they weren’t damaged in the process of being screwed into the face plates.
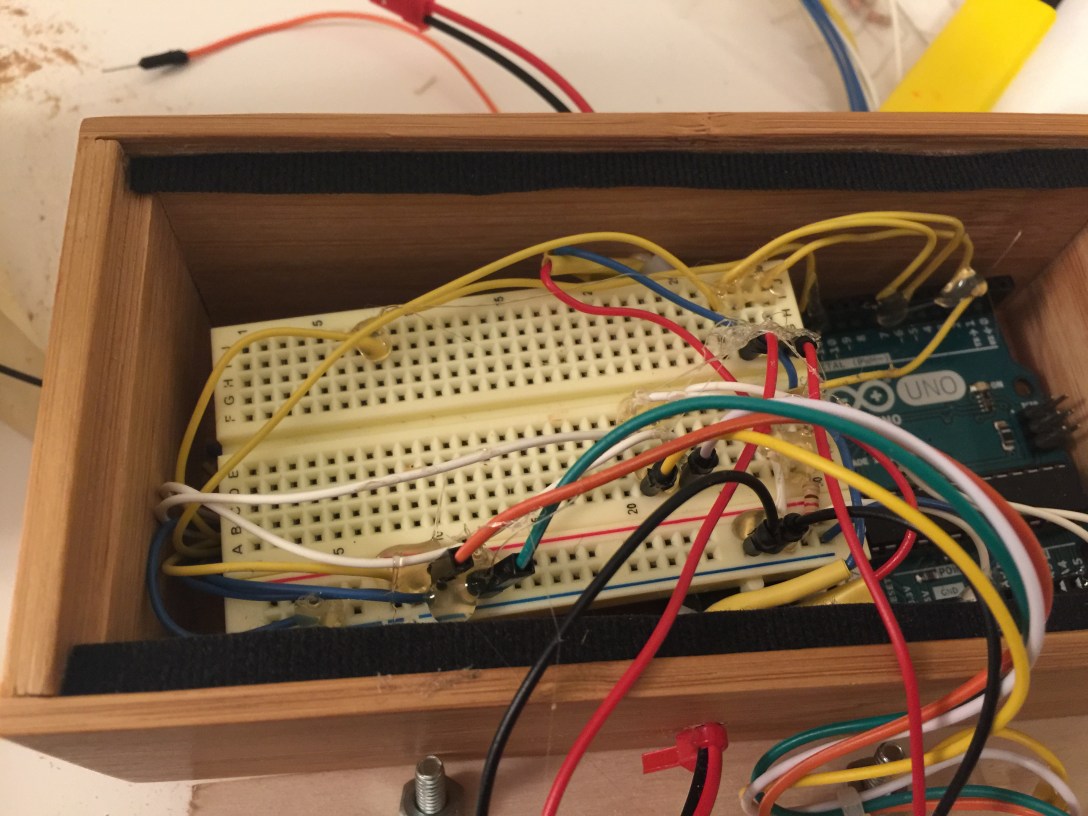
I then began the very hairy process of wiring the bots. This is when I realized just how little space there was inside these boxes. It was pretty agonizing, to be honest. I had to cut my wires super short so that they would but not short enough to pop out of the breadboard. So much time. So many zip ties to help manage tension.
I had to use cable wire velcro to line the edges of the box so that the tops wouldn’t pop off from the pressure of the wires inside.

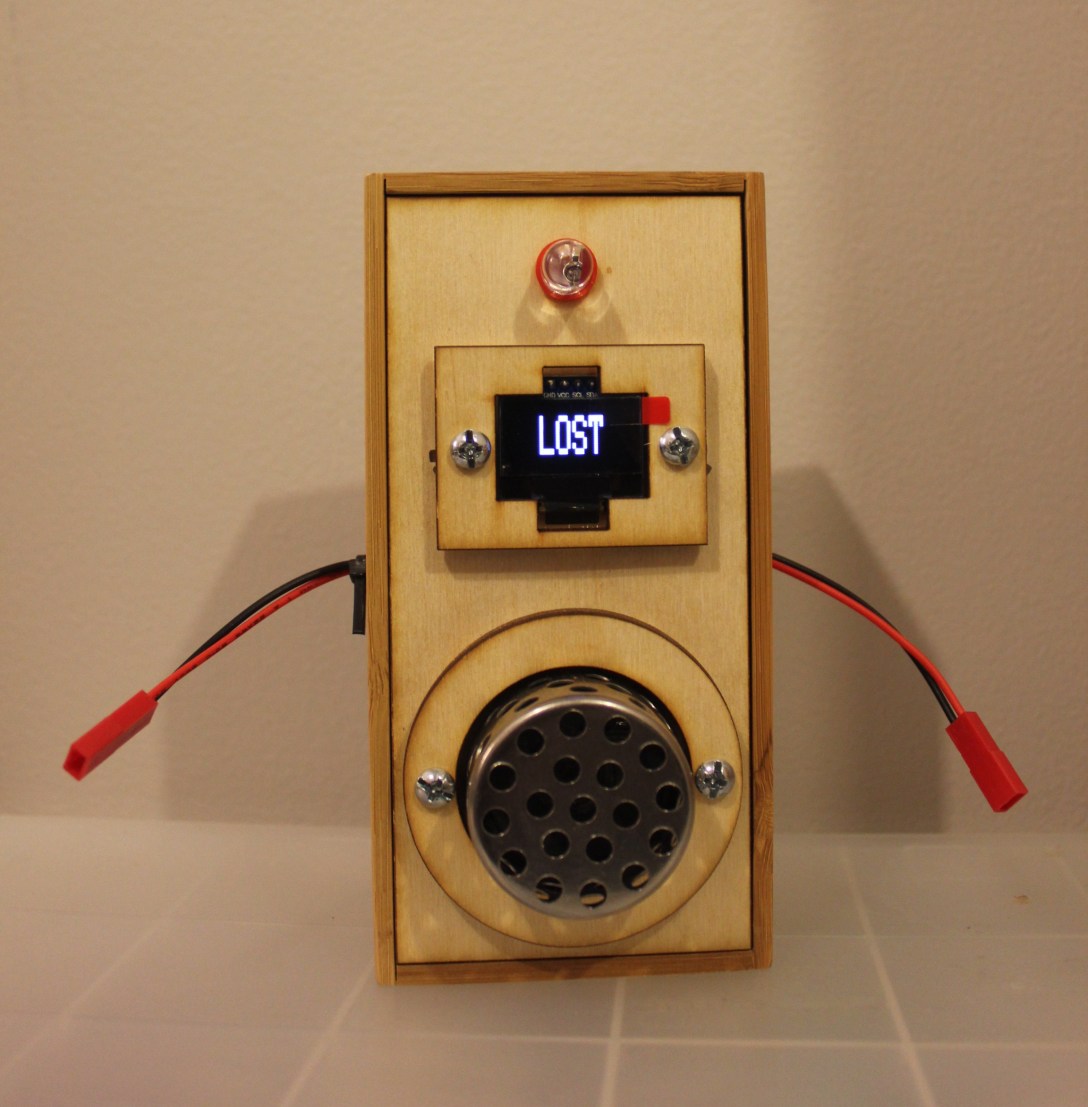
Here are some beauty shots of the final project!